Přírodovědci si dobře uvědomují, že jednou ze základních vlastností života je schopnost rozmnožování. Právě tím se živá příroda odlišuje od neživé. Během miliard let evoluce bylo vyvinuto mnoho způsobů replikace organismů – počínaje pučícími rostlinami přes pohlavní živočichy až po útočící viry. Nyní ale výzkumníci objevili zcela novou formu biologické reprodukce a svůj objev použili k vytvoření vůbec prvních rozmnožujících se živých robotů.
Stejný tým, který před rokem sestrojil první živé roboty (neboli xenoboty), zjistil, že tyto počítačem navržené a ručně sestavené organismy mohou vplout do Petriho misky, najít tam jednotlivé buňky, tisíce jich shromáždit a sestavit pak malé xenoboty uvnitř svých „úst“. Celé to vypadá, jako když ve videohře Pac-Man požírá kuličky.
A tito xenoboti pak najdou další buňky a vytvoří z nich své další kopie. Proces pak může pokračovat znovu a znovu, pořád dokola. „Navrhneme-li je správně, pak se budou opravdu samoreplikovat,“ popsal pro média Joshua Bongard, počítačový vědec a odborník na robotiku z Vermontské univerzity, který se na vytvoření xenobotů podílel. Se svými kolegy výsledky experimentu popsal koncem listopadu 2021 v časopisu Proceedings of the National Academy of Sciences.
Evoluce v superpočítači

Evoluce xenobotů je částečně simulována na superpočítačích. | Zdroj: Pixabay
V prostoru Petriho misky se čile pohybuje Pac-Manovi podobné shromáždění buněk – shluk, tvarově podobný hlavnímu hrdinovi ze starodávné počítačové hry, který pilně shromažďuje další kmenové buňky. Po krátkém čase zrání se nové uskupení chová stejně jako jeho „výrobce“. Po pěti takových „levelech“ je konec a nové biologické stroje již nevznikají.
Badatelé již v březnu 2020 představili první řadu xenobotů a na svůj výzkum dostali finance od americké armádní agentury DARPA v programu Lifelong Learning Machines. Od samotných počátků si při vývoji xenobotů vzali na pomoc algoritmy na superpočítačích.
Výkonnému stroji Deep Green bylo nejprve zadáno vyvinout optimalizovaný tvar xenobota. Evoluční algoritmy simulovaly chování několika miliard forem. Optimálním výsledkem ze simulací se stal tvar Pac-Mana – či z matematického pohledu, polovina torusu.
Superpočítače disponují obrovskou výpočetní kapacitou, takže jsou schopné takových návrhů vytvořit gigantické množství. Vědci je pak nechali vytvořit přes sto generací těchto biologických strojů, než pokročili do další fáze – přesunu experimentu z virtuálního prostředí do skutečné laboratoře.
Z buněk odebraných z embryí žáby pak vytvořili xenoboty. Vypustili je do nádobek s vodou, kde sledovali, jak si laboratorně vyrobené stroje povedou. Některé se pokoušely pohybovat přímo, jiné se točily dokolečka, anebo se dokonce spojovaly s jinými.
Smysly řízený pohyb vpřed
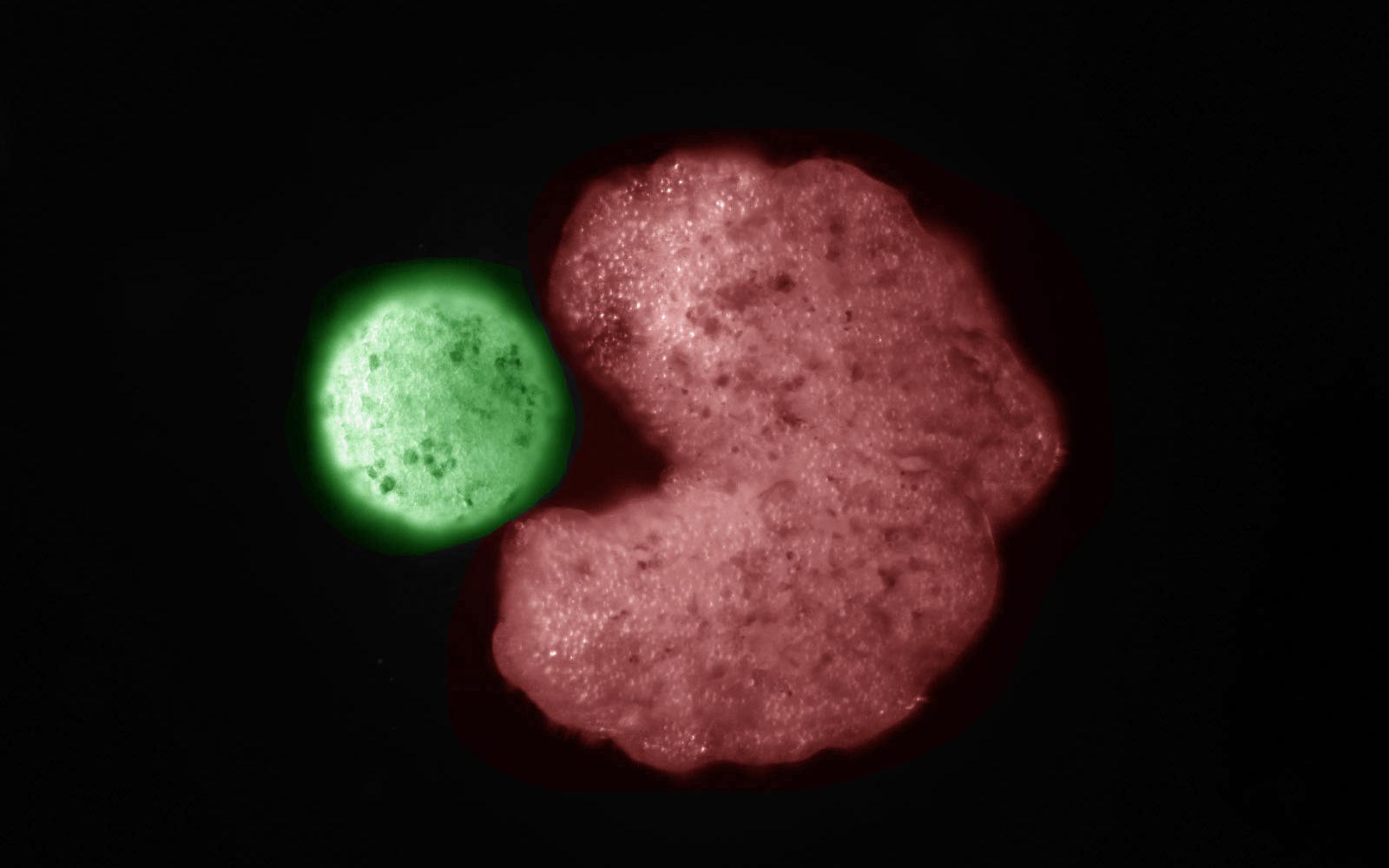
Výsledkem superpočítačových simulací se stal tvar podobný hlavnímu hrdinovi ve hře Pac-Man. | Zdroj: Douglas Blackiston a Sam Kriegman, Wyss Institute
Biologické stroje mají jednoho dne vznikat například z buněk lidských pacientů a dodávat na konkrétní místa v těle účinné látky nebo sbírat třeba mikroplasty ve světových mořích a oceánech.
Vědci věří, že organismy postupně upraví tak, aby měly i cévy, základní nervový systém a senzorické buňky, vytvářející jednoduché oči. Díky nim by měly být schopné vnímat okolní svět a také na něj reagovat – použijí-li se buňky z embryí savců, mohl by organismus přežít i mimo vodu, na souši.
Co dalšího mají nové řady xenobotů umět? „Především zvládat smysly řízený pohyb vpřed,“ uvádí Sam Kriegman z Vermontské univerzity. „Xenoboti, kteří jsou konstruovaní tak, že se cíleně pohybují ke vzdálenému podnětu – například ke zdroji světla – by byly mnohem užitečnější než ty současné, které se jenom náhodně ‚střílejí‘ prostředím.“ Musí také umět spolehlivě rozpoznat buňky, na něž mají působit. A naučit se, jak na svém cíli provést jasně definované úkoly.
Pro tyto další kroky výzkumníkům nechybí vzory z přírody. „Precizní navigaci je možné pozorovat v mnoha organismech, od buněk až po vlásečnicové jednobuněčné protozoie,“ říká Michael Levin, člen výzkumného týmu. „Můžeme využít stejný mechanismus. Kromě toho také z bezpečnostních důvodů chceme, aby xenoboti žili jenom omezený čas a byli snadno biologicky odbouratelní.“
Financováno armádou
Badatelé připouštějí, že jejich práce vyvolává řadu etických otázek. Zejména proto, že budoucí varianty xenobotů budou mít nervový systém, a tedy schopnost vnímat svět. Další obavy může vyvolávat fakt, že výzkum byl financován americkou armádou – konkrétně vojenskou agenturou DARPA, která se snaží podporovat nejmodernější technologie v zájmu Spojených států.
Další cíle výzkumu jsou ambiciózní a dají se využít v mnoha oborech, také v medicíně: projekt si neklade za cíl jenom vyrábět robůtky, ale také pochopit samotný „software života“. „Přemýšlíme-li o porodních defektech, rakovině, rakovině způsobené nemocemi – všechny tyto věci by se daly vyřešit, kdybychom věděli, jak vytvářet biologické struktury, a měli tedy kontrolu nad růstem různých forem,“ uzavírá Michael Levin.
Algoritmus trestá a odměňuje
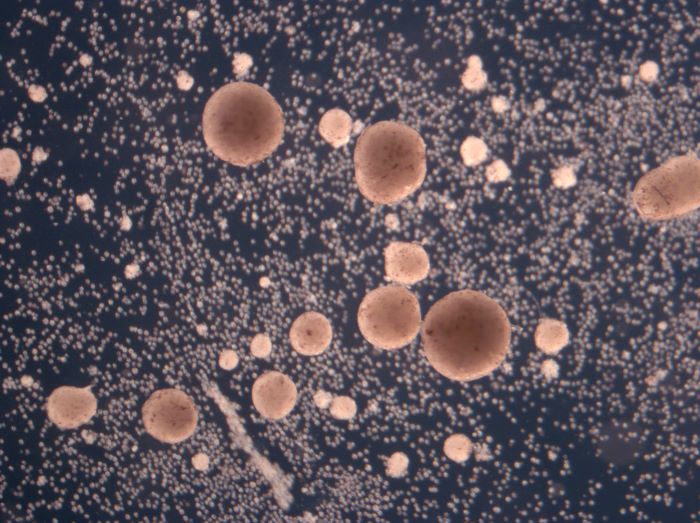
| Zdroj: Douglas Blackiston a Sam Kriegman, Wyss Institute
Malí roboti by se měli umět pohybovat cíleně, aby byli schopni v těle dopravit látky na konkrétní místo. Výzkumníci se tak snaží vypořádat s Brownovým pohybem, který náhodně pohybuje mikroskopickými částicemi a znemožňuje nanoplavcům dorazit k cíli.
Vědci z Univerzity v německém Lipsku se rozhodli vyřešit i tento problém a zkusit nanoroboty naučit plavat správným směrem za pomoci umělé inteligence. Strojové učení by mohlo malým mikrorobotům pomoci plavat kapalinou a dosáhnout svého cíle, aniž by byli sraženi a ovlivněni náhodným pohybem ostatních částic.
V Lipsku tedy chtějí dát svým nanoplavcům „mozek“: algoritmus se strojovým učením, který odměňuje „správné“ pohyby robota ve směru požadovaného cíle. Algoritmus strojového učení – „mozek“ mikrorobota – je spuštěn na počítači. Sleduje jeho pohyb a dává pokyn laseru vystřelit na přesný bod na povrchu robota tak, aby se přiblížil k cíli.
Pokud ho tato instrukce posune blíže k cíli, je algoritmus „odměněn“, pokud instrukce posune robota dále od cíle, je algoritmus „potrestán“. V průběhu času se algoritmus z těchto odměn a sankcí naučí, které pokyny jsou nejlepší pro rychlé a efektivní dopravení nanorobota k cíli.