Podle vědců je tento inovativní systém inspirovaný živými organismy, představuje významný pokrok v oblasti robotiky.
Klíčové vlastnosti nové robotické nohy:
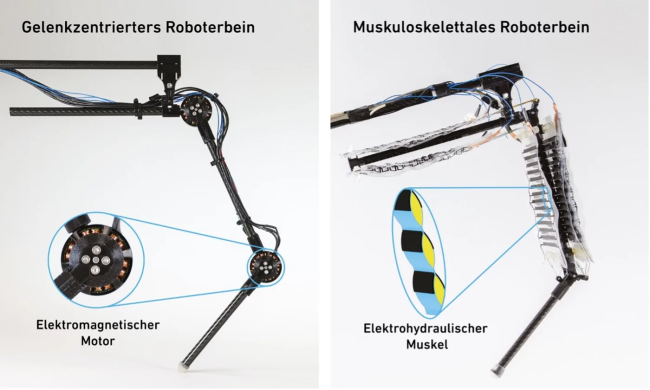
- Inspirace živými organismy: Robotická noha napodobuje pohyby živých tvorů, což jí umožňuje manévrovat a pohybovat se energeticky účinněji než předchozí roboti.
- Elektrohydraulické aktuátory: umělé svaly nazývané HASEL jsou tvořeny plastovými vaky naplněnými olejem s elektrodami. Při aplikaci napětí se elektrody přitahují, což způsobuje zkrácení vaku a pohyb svalu.
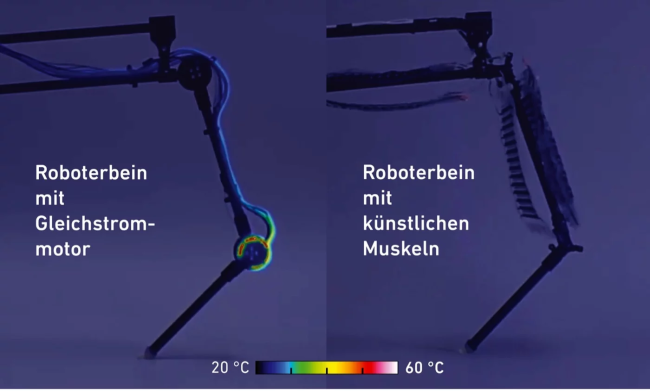
- Energetická účinnost: Ve srovnání s konvenčními elektrickými motory spotřebovává robotická noha s umělými svaly výrazně méně energie, zejména při udržování statické polohy.
- Adaptabilita: Systém se dokáže přizpůsobit různým typům povrchů bez potřeby složitých senzorů, podobně jako lidské nohy.
- Vysoká výkonnost: Robotická noha je schopna provádět vysoké skoky a rychlé pohyby, což demonstruje její potenciál pro budoucí aplikace v robotice.
Zdroj: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS
Zdroj: Thomas Buchner / ETH Zurich and Toshihiko Fukushima / MPI-IS
Thomas Buchner z ETH Curych vysvětluje princip fungování: "Aktuátory jsou plastové vaky naplněné olejem. Jakmile přivedeme napětí na elektrody, přitahují se k sobě díky statické elektřině. Při zvýšení napětí se elektrody přiblíží a vytlačí olej na jednu stranu, čímž se vak celkově zkrátí." A doplňuje: "Když musí robotické nohy držet určitou polohu po delší dobu, protéká stejnosměrným motorem, který je pohání, velké množství proudu. Naproti tomu umělé svaly, které fungují na principu elektrostatiky, zůstávají chladné, protože jimi při konstantním zatížení neprochází žádný proud."
Výzkumníci prokázali, že jejich robotická noha je nejen energeticky účinnější, ale také flexibilnější než konvenční systémy. Robert Katzschmann z ETH Curych dodává: "Přizpůsobení se terénu je klíčovým aspektem. Když člověk dopadne po skoku, nemusí předem přemýšlet, zda by měl ohnout kolena v úhlu 90 nebo 70 stupňů."
Mohlo by vás zajímat

Ačkoli je technologie stále ve vývoji a má určitá omezení (například noha je v současnosti připevněna k tyči a skáče v kruzích), výzkumníci vidí velký potenciál pro budoucí aplikace v měkké robotice. Robert Katzschmann z ETH Curych poznamenává: "Pokud zkombinujeme robotickou nohu v čtyřnohém robotovi nebo humanoidním robotovi, možná jednoho dne, až bude napájena baterií, ji budeme moci nasadit jako záchranného robota."
Mohlo by vás zajímat
Tento průlomový výzkum otevírá nové možnosti v oblasti měkké robotiky a představuje významný krok směrem k vytvoření robotů, kteří se budou pohybovat podobně jako živé organismy. Výzkum je výsledkem spolupráce v rámci Max Planck ETH Center for Learning Systems (CLS), partnerství mezi MPI-IS a ETH Curych, které se zaměřuje na interdisciplinární výzkumné otázky v oblasti návrhu a analýzy přírodních a umělých učících se systémů.





